由于业务需要,项目侧重于检测远距离且高速的目标,因此将原有的“视觉 + 激光雷达(LiDAR)”方案,升级修改为了“视觉 + 4D 毫米波雷达”的融合感知方案。
标定时遇到了一些问题:
- 毫米波点云极其稀疏:相比于激光雷达每秒数百万个点的稠密反射,4D 毫米波雷达点云非常稀疏,缺乏可直观识别的轮廓与几何特征,极难通过传统的点云匹配算法实现自动配准。
- 室内多径干扰:在室内标定环境下,强金属杂噪(如墙体、立柱、桌椅)会产生大量的多径反射杂点,使得真实的靶件(如角反射器)特征淹没在背景噪声中。
- 维度对准麻烦
大概的标定流程为:
- 第一步:购买角反射器,并初步测试点云反射效果。
- 第二步:自己写一个实时投影验证工具,实时同步抓拍与立体预验证,主要是因为即使是角反射器,也不一定会有明显的点云。
- 第三步:自己写一个实时可视化微调六自由度外参的工具,也就是可视化调整相机与雷达之间的相对位置与角度,使之尽量完美对齐。
- 第四步:记录当前外参,并使用foxglove做视觉+4D毫米波点云的投影可视化测试,或者自己写程序做投影可视化测试。
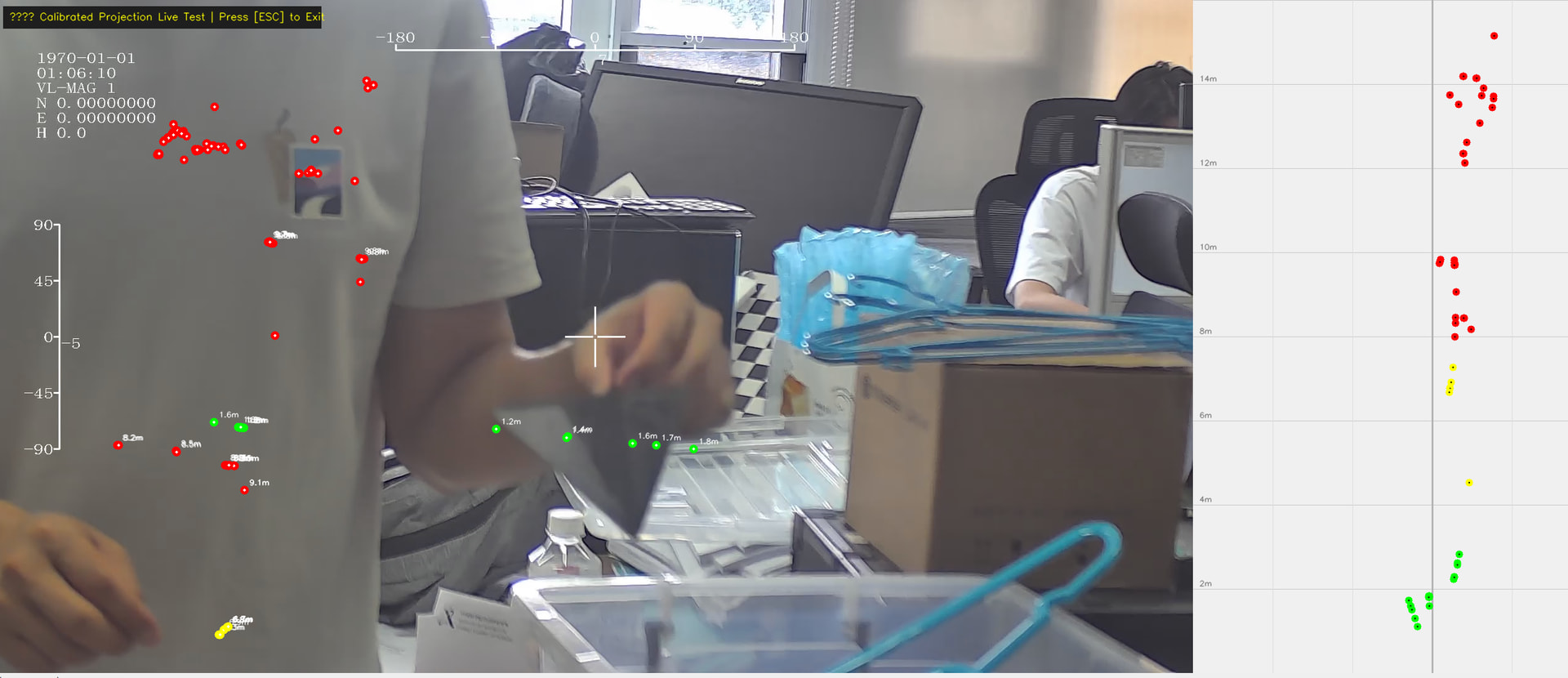
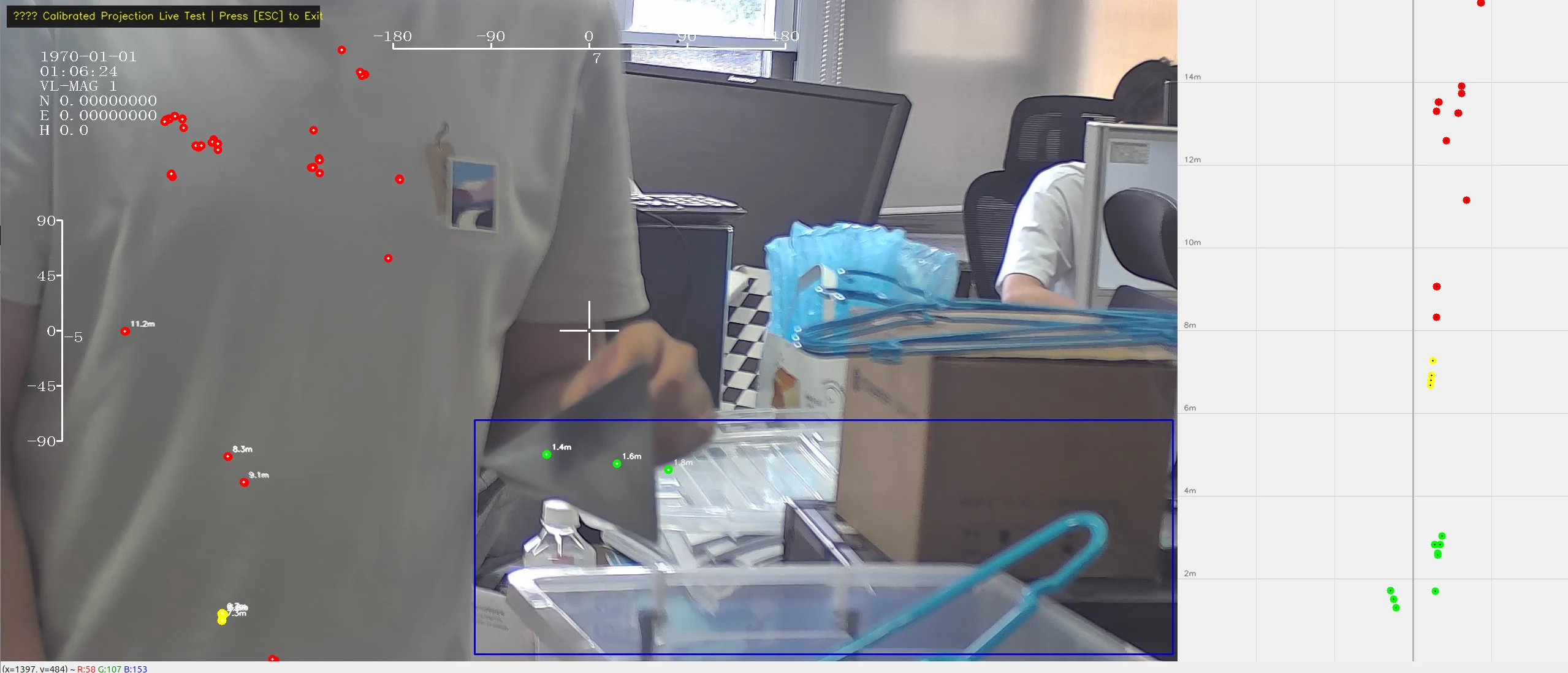
如下是标定效果(请忽略噪声问题),由于是测试,效果不是很完美,但可以看到点云和图像基本对齐。有遇到同样问题的佬们欢迎交流!
1 个帖子 - 1 位参与者
来源: LinuxDo 最新话题查看原文