先展示成果,这是我的毕业论文第五章部分,做的是一个采摘机器人的运动学分析,需要完成的内容包括机器人的正逆运动学计算,以及工作空间对果实密集区域的覆盖范围验证。

下面是自己摸索完成的过程
自己提前先建好模型,把标准DH法的坐标系按要求建立,计算出DH参数表的每一项信息。
然后使用GPT5.4模型,把我要完成的第五章大纲和相关运动学分析的参考论文发给它,问他可以使用什么软件完成,需要下载哪些插件,以及明确自己的知识水平和会使用哪些相关软件。
我按照它的说明安装了matlab和Symbolic Math Toolbox组件,然后新建一个脚本(才知道matlab可以用脚本,上课老师没教呀),输入了它给的计算代码,发现居然一次性就算出了结果,令我大为震撼。
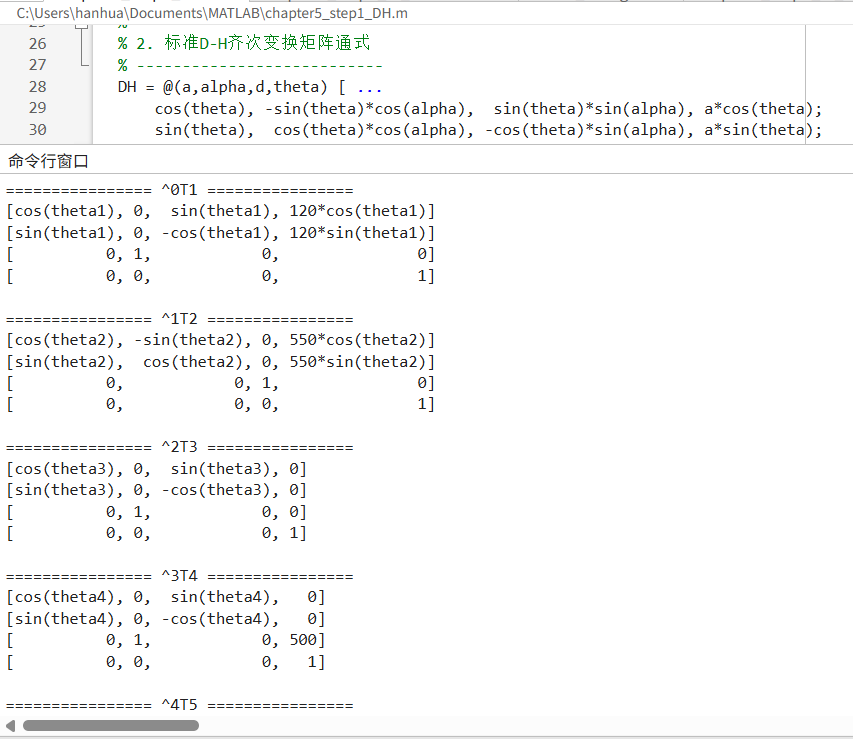
也可能是因为6自由度的机器人运动学分析本身就比较大众,所以一次性把所有相邻的坐标系表换矩阵、总变换矩阵以及总变换矩阵里每个元素的表达式都算出来了

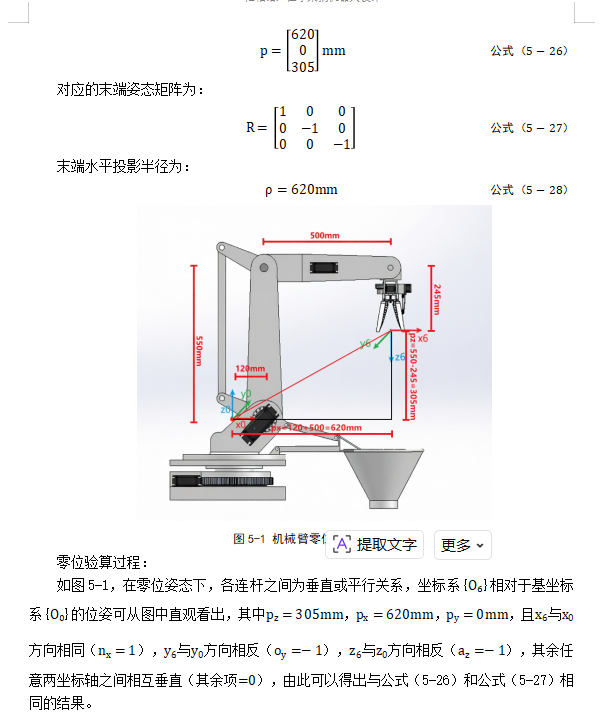
再让它写一个脚本,输入量是每个关节的角度,q = [0 0 0 0 0 0]ᵀ(全零点姿态),输出是P和R(也就是总变换矩阵的位置和姿态矩阵),计算同样是一次成功,和我用模型验算的一样,证明运动学模型建立和正运动学分析部分没有问题
逆运动学就不细讲了,比较复杂,总之也是写几个脚本,用末端的位姿和DH参数表,反推出每个关节的角度表达式,先用几组角度数据先正运动学计算一遍,再把结果放到逆运动学里计算,如果最后得出的多组解里有一组是正运动学时的原始数据,就意味着逆运动学计算也没问题。这一章的公式部分到这基本就写完了。
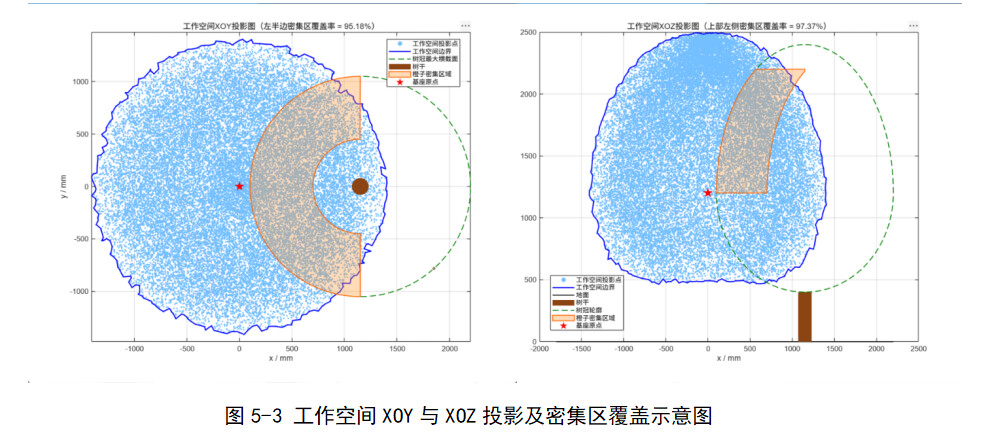
下一部分是蒙特卡洛法求解工作空间,以正运动学的公式为基础,在关节角度允许的范围内,均匀随机采样30000次,将结果绘制成一张三位点云图,同时得到xyz三个方向的极限值。

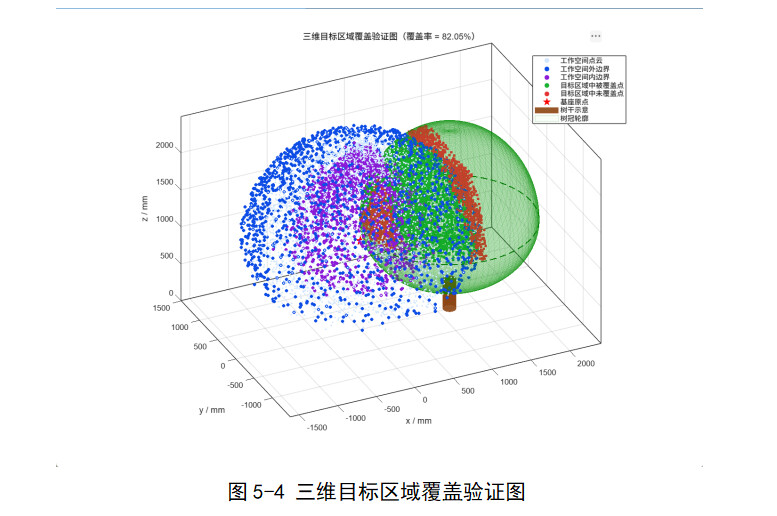
最后是用简单的几何模型给果树和该侧的果实密集区域也表示出来,果树和果实密集区域的参数从参考论文中获得,将详细的参数都发给AI,继续用代码建模,改了几个版本后基本符合参数要求了,就把工作空间的点云图和果树放到同一个空间里,观察并计算工作空间对果实密集区域的覆盖率。
我这里做了三个图,XOY截面和XOZ截面的平面示意图和三维的实际验证图
整个第五章内容用了126轮对话完成(从下载matlab到完成第五章总共加起来花了20小时左右),大部分情况是我在问AI公式是怎么推导的,以及发现计算结果和我预想的不一样,在排查是哪里的数据错了。
中间重做了两次,一次是正运动学的全零点姿态算错,原因是我把DH参数里的连杆长度 a_i 当成了实际长度,导致原本为0的 a_4 和 a_6 多出了值被代入计算;另一次是计算时用到的DH关节角 θ_i 和我定义的关节角 q_i 有一个角度差,我最初以为两个是同一个值,导致没有做转换就拿去计算。
整个过程中,每完成一节,就让AI把对应的论文正文写出来,自己理解一遍原理和逻辑确定没问题后,复制去WPS里改成学校要求的格式。
另外感谢白羽佬的格式转换软件,复制公式很方便。
【开源自荐】不乱码!一键粘贴AI回答的Markdown到Word/Excel![]() - 开发调优 - LINUX DO
- 开发调优 - LINUX DO
10 个帖子 - 7 位参与者